
Ein neuer Entwurf für den bereits erwähnten inneren Rahmen des Tookii geht in Kürze in den Druck – und verfolgt neben allgemeinen Verbesserungen auch einige neue Ansätze. Vorallem soll das Modell mit dem MakerBot Replicator 2 durchgängig gedruckt werden können – ohne Stützmaterial. Das vermeidet insbesondere das lästige Nacharbeiten.
Die Form ist zudem geprägt von der Idee, Tookii um ein haptisches Feedback zu ergänzen: Er soll Luft-Impulse ausströmen können, die auf der Handfläche wahrgenommen werden können.
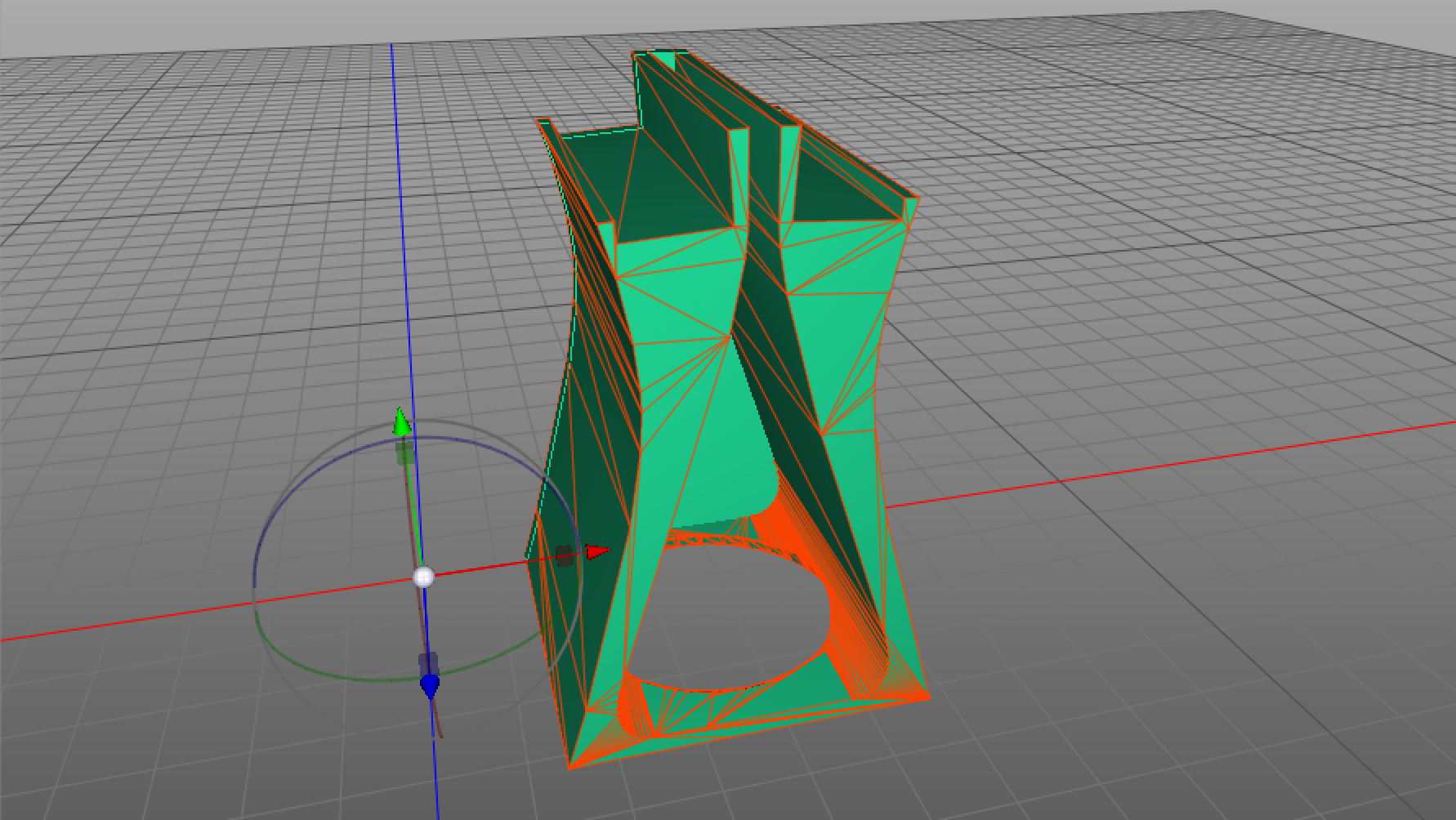
 Den Luftstrom erzeugen wollen wir durch einen Lüfter, der an der Unterseite des Modells angebracht wird – daher auch die neue, kreisrunde Aussparung am Boden. Durch die aus der Form resultierenden Verdichtung der Luft soll der Effekt verstärkt werden – soweit zumindest in der Theorie.
Den Luftstrom erzeugen wollen wir durch einen Lüfter, der an der Unterseite des Modells angebracht wird – daher auch die neue, kreisrunde Aussparung am Boden. Durch die aus der Form resultierenden Verdichtung der Luft soll der Effekt verstärkt werden – soweit zumindest in der Theorie.
 Die Formsprache ist dadurch recht dynamisch und geprägt von Kurven. Während die Außenansicht eher an die Form eines Kleides erinnert, entspricht die innere Struktur eher der Form einer Vase.
Die Formsprache ist dadurch recht dynamisch und geprägt von Kurven. Während die Außenansicht eher an die Form eines Kleides erinnert, entspricht die innere Struktur eher der Form einer Vase.
In den am oberen Ende vorgesehenen Plateaus sollen die Sharp Infrarot-Sensoren Platz finden. Dank Philipps neusten Erkenntnissen durch seine Messungen mit dem Oszilloskop wissen wir nun, dass die Sensoren, um gegenseitige Interferenzen zu verhindern, eine leichte Neigung benötigen – sie müssen quasi voneinander weg schielen. Dies ist mit einer Neigung von 1° berücksichtigt.
Genau zwischen beiden Sensoren soll dann der Luftimpuls herausströmen können. Es fehlen in diesem Modell noch jegliche Vorrichtungen zur Befestigung der übrigen Technik. Sollte die Form wie vorgesehen funktioniert, werden diese an den kurvigen Flanken ergänzt.
2 Comments
Join the discussion and tell us your opinion.
[…] Wenn man das nicht Rapid-Prototyping nennt – was dann? Der angekündigte Prototyp des inneren Rahmens unseres Tookiis ist fertig. Und es wird windig. Nach knappen drei Stunden Druckzeit erstrahlte der […]
[…] Wenn man das nicht Rapid-Prototyping nennt – was dann? Der angekündigte Prototyp des inneren Rahmens unseres Tookiis ist fertig. Und es wird windig. Nach knappen drei Stunden Druckzeit erstrahlte der […]