
Category / Tookii
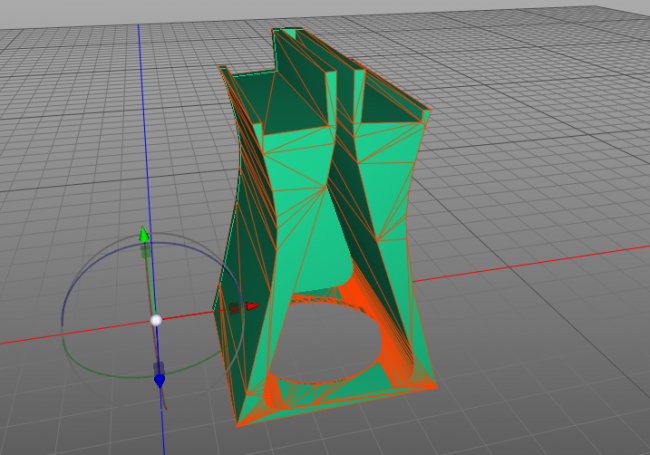
Innerer Rahmen: Haptisches Feedback dank Windkanal
Ein neuer Entwurf für den bereits erwähnten inneren Rahmen des Tookii geht in Kürze in den Druck – und verfolgt neben allgemeinen Verbesserungen auch einige neue Ansätze. Vorallem soll das Modell mit dem MakerBot Replicator 2 durchgängig gedruckt werden können – ohne Stützmaterial. Das vermeidet insbesondere das lästige Nacharbeiten. Die Form ist zudem geprägt von der Idee, Tookii um ein haptisches Feedback zu ergänzen: Er soll Luft-Impulse ausströmen können, die auf der Handfläche wahrgenommen werden können.
Accelerometer Test: Modus Switch
Das verbaute Accelerometer eröffnet eine Vielzahl von Interaktions-Möglichkeiten: Neben Neigungen auf der X- und Y-Achse, erkennt das ADXL 345 Accelerometer auch Taps und Double Taps. Getestet wurde ein Double Tap zur Aktivierung der Modi Auswahl (Musik-, Arrow- und Midi-Modus) und einen Tilt in die jeweilige Richtung zur Aktivierung des entsprechenden Modus. Der Double Tap funktioniert zuverlässiger als erwartet, neigt jedoch zu Fehlinterpretationen z.B. bei Erschütterungen der Tischplatte.

Modulor Dosen Prototyp
Während Martin Türmchen in luftige Höhen konzipiert, widme ich mich der Miniaturisierung unseren Prototyps: Der Modulor-Dosen-Prototyp misst gerade mal 3,5 cm in der Höhe, bei einem Durchmesser von 7 cm. Nicht gerade schön, aber kompakt!
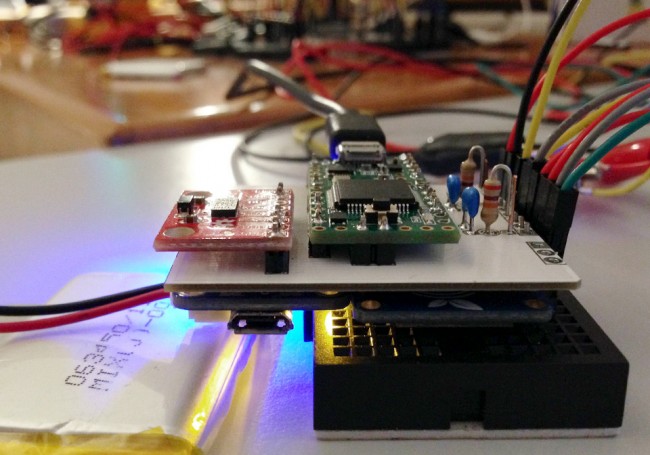
PCB v0.1 lebt!
Unser erstes PCB lebt – und ist voll funktionsfähig. Kabelsalat erfolgreich auf 47x41x22mm komprimiert. Ein Meilenstein! Trotzdem werden einige Verbesserungen am nächsten PCB vorgenommen: 1. Pull-Up-Widerstände für Accelerometer integrieren Der wohl gröbste Fehler: Ich habe vergessen die 470 kΩ Widerstände der SDA und SCL Pins auf 3V auf dem PCB zu integrieren. Ohne diese Widerstände ist das Accelerometer funktionslos. Durch einen umständlichen Fix konnten die Widerstände aber trotzdem noch zwischen PCB und den unteren Modulen platziert werden. 2. Widerstände der Low Pass Filter horizontal platzieren Widerstände können horizontal oder vertikal auf einem PCB positioniert werden. Die vertikale Ausrichtung beansprucht mehr Höhe, aber weniger Platz auf der Platine – da ein „Fuß“ des Widerstands um fast 180 Grad gebogen wird. Leider bilden die vertikalen Widerstände nun den höchsten Punkt auf der Oberseite – der Trick Header-Pins anstatt der 6mm hohen Steckleisten zu nutzen war mir bei der Planung des PCB noch nicht bewusst. 3. Breite des PCB um 1mm vergrößern Durch die Planung mit Steckleisten anstatt der tatsächlich verwendeten Module, entfallen auch die korrekt dimensionierten Modul-Umrisse in der Leiterplatten-Ansicht von Fritzing. Durch einen kleinen Berechnungsfehler steht nun das Accelerometer einen knappen Millimeter über das PCB hinaus.
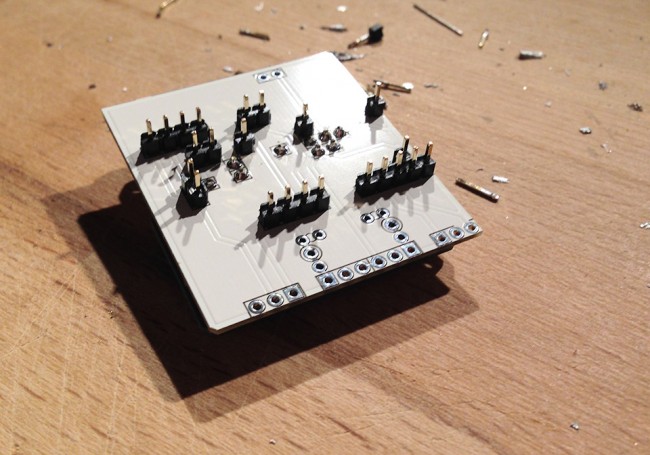
PCB bestücken²
Um Platz zu sparen wurde die Platzierung der Module auf der Leiterplatte „doppelseitig“ konzipiert: auf der Oberseite sitzt der Teensy Microcontroller, das Accelerometer und die Lowpass-Filter, auf der Unterseite das Bluetooth- und Powermodul. Die Herausforderung bestand nun im „doppelseitigem” Löten: Hat man erst mal eine Seite mit Modulen bestückt und verlötet, kommt man nämlich nicht mehr an die Header-Pins der Module heran, die von der anderen Seite montiert werden sollen. Aus diesem Grund war zunächst geplant, die Oberseite mit Steckleisten (Female-Headers) zu versehen, auf welche die Komponenten dann einfach „gesteckt“ werden. Nachteil: Die Steckleisten würden unsere Konstruktion um (ziemlich sinnlose) 6mm erhöhen. Die Lösung: Anstatt der Steckleisten einfach normale Header-Pins auf beide Seiten des PCB löten, siehe Bild. Auf diese Pins können dann stressfrei die restlichen Komponenten gelötet werden. Mein Problem: Ich hatte alle Module schon mit Header-Pins ausgestattet und fest verlötet. Entlöten macht wirklich keinen Spaß – aber mit der Entlötpumpe im Anschlag und der Freundin als dritte Hand konnten die Module erfolgreich von ihren Pins befreit werden.